Connect to the Controller
KAS provides all the commands for controlling the target in the Device toolbar:

| Icon | Description |
|---|---|

|
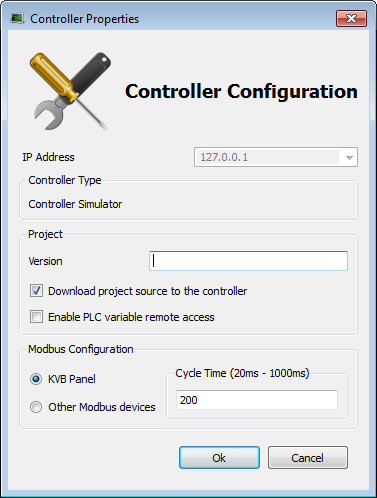
Show the controller communication properties dialog (PLC |

|
Change the controller IP address to connect with KAS Simulator. In this simulated mode, the controller properties change and the Controller Type includes the IP address See Using the KAS Simulator for more information. |
|
|
Compile the project. |
|
|
Compile and download the project. This downloads the application and Project Source files. |

|
Establish a connection with the target controller. See the Status Bar for more information about statuses. |

|
Close connection with the target controller. |

|
Download the application to the targeted controller. The application must not be running. See Download the Project for more information. |

|
Start the application. It can be either:
|

|
Stop the application. |

-
-
If a previous download failed (due to the disconnected Ethernet
 Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) or the controller is turned off), the application cannot be started.
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) or the controller is turned off), the application cannot be started. Additionally:
- No version information is shown in the web server or status bar.
- The Start, Cold Start, and Download buttons are not available on the web server.
- If the AKD PDMM or PCMM tries to auto-start, an E24 error is flashed on the 7-segment display.
Review the Controller logs for more information.
Verify the Simulated device mode is active (click the button).
Click the Connect Device button () to establish the connection with the target controller.
-
-
You need to configure the device before connecting.
See Configure the Controller for more information.
Actions to Prevent Compatibility Issues
The software versions of the KAS-IDE![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger and the KAS Runtime
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger and the KAS Runtime![]() In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running have to match to avoid compatibility issues.
In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running have to match to avoid compatibility issues.
See KAS IDE to Runtime Compatibility for more information.
-
-
The software versions of the KAS-IDE and the KAS Runtime are also available in the local log messages (the level for this message is INFO).
See Information and Logs window for more information.
When another KAS-IDE is already connected to the controller, a warning opens and the connection is discarded to prevent any conflict.
Application Status Bar
The status bar provides global information about the target and the name of the running application currently stored in the device.
Text with an orange background means that the version of the application is different between the KAS-IDE and the target.
See Status Bar for more information.
Message Window
Every log message has this information:
- Timestamp A timestamp is a sequence of characters, denoting the date and/or time at which a certain event occurred
- ID
- Message
-
-
Once connected to the device, it is no longer possible to edit the PLC programs, unless Online Change
Applies to downloading PLC code changes while the applicaiton is running. is active.
See Compile the Project.
-
Depending on the number of AKD drives physically present in the EtherCAT ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network, the KAS-IDE might slow down when getting data.
The KAS Runtime is not concerned with this limitation.






